On 16th October, 2020, I thought of using Pytorch to create a near SOTA classifier for the simplest Computer Vision dataset – MNIST, introduced by Yaan LeCun. Current state of the art is about 99.84% using Capsule networks. I wanted to test out different interesting architectural styles for creating internal ensembles of the model, and for that experiment, I used Pytorch!
Firstly, let's install the uncommon dependencies, given, you have installed the common ones!
! pip install hiddenlayer graphviz torchviz
So, let's dive into the code.
Firstly, the basic imports,
import numpy as np import torch import torch.nn as nn import torch.optim as optim import torch.utils.data as Data from torchvision import datasets, transforms import torch.nn.functional as F import timeit import unittest
We need to add seeds for reproducibility of results in other machines
torch.manual_seed(0) torch.backends.cudnn.deterministic = True torch.backends.cudnn.benchmark = False np.random.seed(0)
For running in GPUs, we need to use ‘cuda’, which can be achieved with the following piece of code
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
Computer vision datasets can be trained and tested with high accuracy via image augmentations, we have used Cropping, resizing, colour jittering, rotation and random affine transform to make extensive data augmentation. We have also used the mean and standard deviation to normalize the images during training, which will make the deep learning model easier to train.
# define a transforms for preparing the dataset transform = transforms.Compose([ transforms.CenterCrop(26), transforms.Resize((28,28)), transforms.ColorJitter(brightness=0.05, contrast=0.05, saturation=0.05, hue=0.05), transforms.RandomRotation(10), transforms.RandomAffine(5), # convert the image to a pytorch tensor transforms.ToTensor(), # normalise the images with mean and std of the dataset transforms.Normalize((0.1307,), (0.3081,)) ])
After setting the basic stuffs, we will load the dataset into train and test part, which are imported and downloaded from the datasets module.
# Load the MNIST training, test datasets using `torchvision.datasets.MNIST` # using the transform defined above train_dataset = datasets.MNIST('./data',train=True,transform=transform,download=True) test_dataset = datasets.MNIST('./data',train=False,transform=transform,download=True)
This is a relatively small dataset with 60K images, but for large datasets we need to use batch-size, which will store the images in primary memory from the secondary memory before sending it to GPUs. This will create a certain amount of bottleneck in computation, but this is the standard thing to do, when we are dealing with massive amounts of data.
# create dataloaders for training and test datasets # use a batch size of 32 and set shuffle=True for the training set train_dataloader = Data.DataLoader(dataset=train_dataset, batch_size=128, shuffle=True) test_dataloader = Data.DataLoader(dataset=test_dataset, batch_size=128, shuffle=True)
Now it’s time to build our Deep Neural Network Model! The architecture is some-what shown below.
The Pytorch code can be written as:
# My Net class Net(nn.Module): def __init__(self): super(Net, self).__init__() # define a conv layer with output channels as 16, kernel size of 3 and stride of 1 self.conv11 = nn.Conv2d(1, 16, 3, 1) # Input = 1x28x28 Output = 16x26x26 self.conv12 = nn.Conv2d(1, 16, 5, 1) # Input = 1x28x28 Output = 16x24x24 self.conv13 = nn.Conv2d(1, 16, 7, 1) # Input = 1x28x28 Output = 16x22x22 self.conv14 = nn.Conv2d(1, 16, 9, 1) # Input = 1x28x28 Output = 16x20x20 # define a conv layer with output channels as 32, kernel size of 3 and stride of 1 self.conv21 = nn.Conv2d(16, 32, 3, 1) # Input = 16x26x26 Output = 32x24x24 self.conv22 = nn.Conv2d(16, 32, 5, 1) # Input = 16x24x24 Output = 32x20x20 self.conv23 = nn.Conv2d(16, 32, 7, 1) # Input = 16x22x22 Output = 32x16x16 self.conv24 = nn.Conv2d(16, 32, 9, 1) # Input = 16x20x20 Output = 32x12x12 # define a conv layer with output channels as 64, kernel size of 3 and stride of 1 self.conv31 = nn.Conv2d(32, 64, 3, 1) # Input = 32x24x24 Output = 64x22x22 self.conv32 = nn.Conv2d(32, 64, 5, 1) # Input = 32x20x20 Output = 64x16x16 self.conv33 = nn.Conv2d(32, 64, 7, 1) # Input = 32x16x16 Output = 64x10x10 self.conv34 = nn.Conv2d(32, 64, 9, 1) # Input = 32x12x12 Output = 64x4x4 # define a max pooling layer with kernel size 2 self.maxpool = nn.MaxPool2d(2) # Output = 64x11x11 #self.maxpool1 = nn.MaxPool2d(1) # define dropout layer with a probability of 0.25 self.dropout1 = nn.Dropout(0.25) # define dropout layer with a probability of 0.5 self.dropout2 = nn.Dropout(0.5) # define a linear(dense) layer with 128 output features self.fc11 = nn.Linear(64*11*11, 256) self.fc12 = nn.Linear(64*8*8, 256) # after maxpooling 2x2 self.fc13 = nn.Linear(64*5*5, 256) self.fc14 = nn.Linear(64*2*2, 256) # define a linear(dense) layer with output features corresponding to the number of classes in the dataset self.fc21 = nn.Linear(256, 128) self.fc22 = nn.Linear(256, 128) self.fc23 = nn.Linear(256, 128) self.fc24 = nn.Linear(256, 128) self.fc33 = nn.Linear(128*4,10) #self.fc33 = nn.Linear(64*3,10) def forward(self, inp): # Use the layers defined above in a sequential way (folow the same as the layer definitions above) and # write the forward pass, after each of conv1, conv2, conv3 and fc1 use a relu activation. x = F.relu(self.conv11(inp)) x = F.relu(self.conv21(x)) x = F.relu(self.maxpool(self.conv31(x))) #print(x.shape) #x = torch.flatten(x, 1) x = x.view(-1,64*11*11) x = self.dropout1(x) x = F.relu(self.fc11(x)) x = self.dropout2(x) x = self.fc21(x) y = F.relu(self.conv12(inp)) y = F.relu(self.conv22(y)) y = F.relu(self.maxpool(self.conv32(y))) #x = torch.flatten(x, 1) y = y.view(-1,64*8*8) y = self.dropout1(y) y = F.relu(self.fc12(y)) y = self.dropout2(y) y = self.fc22(y) z = F.relu(self.conv13(inp)) z = F.relu(self.conv23(z)) z = F.relu(self.maxpool(self.conv33(z))) #x = torch.flatten(x, 1) z = z.view(-1,64*5*5) z = self.dropout1(z) z = F.relu(self.fc13(z)) z = self.dropout2(z) z = self.fc23(z) ze = F.relu(self.conv14(inp)) ze = F.relu(self.conv24(ze)) ze = F.relu(self.maxpool(self.conv34(ze))) #x = torch.flatten(x, 1) ze = ze.view(-1,64*2*2) ze = self.dropout1(ze) ze = F.relu(self.fc14(ze)) ze = self.dropout2(ze) ze = self.fc24(ze) out_f = torch.cat((x, y, z, ze), dim=1) #out_f1 = torch.cat((out_f, ze), dim=1) out = self.fc33(out_f) output = F.log_softmax(out, dim=1) return output
We can now use the model to set it to GPU.
model = Net().to(device)
We can even check the parameters:
print(model.parameters)
Which will result in:
<bound method Module.parameters of Net( (conv11): Conv2d(1, 16, kernel_size=(3, 3), stride=(1, 1)) (conv12): Conv2d(1, 16, kernel_size=(5, 5), stride=(1, 1)) (conv13): Conv2d(1, 16, kernel_size=(7, 7), stride=(1, 1)) (conv14): Conv2d(1, 16, kernel_size=(9, 9), stride=(1, 1)) (conv21): Conv2d(16, 32, kernel_size=(3, 3), stride=(1, 1)) (conv22): Conv2d(16, 32, kernel_size=(5, 5), stride=(1, 1)) (conv23): Conv2d(16, 32, kernel_size=(7, 7), stride=(1, 1)) (conv24): Conv2d(16, 32, kernel_size=(9, 9), stride=(1, 1)) (conv31): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1)) (conv32): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1)) (conv33): Conv2d(32, 64, kernel_size=(7, 7), stride=(1, 1)) (conv34): Conv2d(32, 64, kernel_size=(9, 9), stride=(1, 1)) (maxpool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (dropout1): Dropout(p=0.25, inplace=False) (dropout2): Dropout(p=0.5, inplace=False) (fc11): Linear(in_features=7744, out_features=256, bias=True) (fc12): Linear(in_features=4096, out_features=256, bias=True) (fc13): Linear(in_features=1600, out_features=256, bias=True) (fc14): Linear(in_features=256, out_features=256, bias=True) (fc21): Linear(in_features=256, out_features=128, bias=True) (fc22): Linear(in_features=256, out_features=128, bias=True) (fc23): Linear(in_features=256, out_features=128, bias=True) (fc24): Linear(in_features=256, out_features=128, bias=True) (fc33): Linear(in_features=512, out_features=10, bias=True) )>
It is good to have unit test modules in case of bigger code bases.
import unittest class TestImplementations(unittest.TestCase): # Dataloading tests def test_dataset(self): self.dataset_classes = ['0 - zero', '1 - one', '2 - two', '3 - three', '4 - four', '5 - five', '6 - six', '7 - seven', '8 - eight', '9 - nine'] self.assertTrue(train_dataset.classes == self.dataset_classes) self.assertTrue(train_dataset.train == True) def test_dataloader(self): self.assertTrue(train_dataloader.batch_size == 32) self.assertTrue(test_dataloader.batch_size == 32) def test_total_parameters(self): model = Net().to(device) #self.assertTrue(sum(p.numel() for p in model.parameters()) == 1015946) suite = unittest.TestLoader().loadTestsFromModule(TestImplementations()) unittest.TextTestRunner().run(suite)
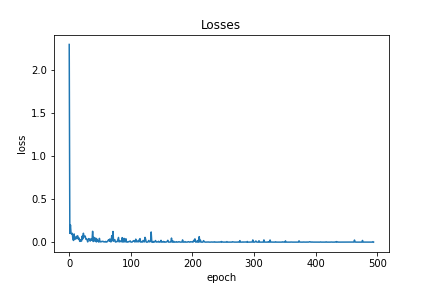
In the training function, we will pass the data by iterating over the data loaders to model in GPU. We will use the optimizer to calculate the loss, and we will record the losses for plotting in a graph.
losses_1 = [] losses_2 = [] def train(model, device, train_loader, optimizer, epoch): model.train() for batch_idx, (data, target) in enumerate(train_loader): # send the image, target to the device data, target = data.to(device), target.to(device) # flush out the gradients stored in optimizer optimizer.zero_grad() # pass the image to the model and assign the output to variable named output output = model(data) # calculate the loss (use nll_loss in pytorch) loss = F.nll_loss(output, target) # do a backward pass loss.backward() # update the weights optimizer.step() if batch_idx % 100 == 0: print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format( epoch, batch_idx * len(data), len(train_loader.dataset), 100. * batch_idx / len(train_loader), loss.item())) losses_1.append(loss.item()) losses_2.append(100. * batch_idx / len(train_loader))
Similarly, for test dataset,
accuracy = [] avg_loss = [] def test(model, device, test_loader): model.eval() test_loss = 0 correct = 0 with torch.no_grad(): for data, target in test_loader: # send the image, target to the device data, target = data.to(device), target.to(device) # pass the image to the model and assign the output to variable named output output = model(data) test_loss += F.nll_loss(output, target, reduction='sum').item() # sum up batch loss pred = output.argmax(dim=1, keepdim=True) # get the index of the max log-probability correct += pred.eq(target.view_as(pred)).sum().item() test_loss /= len(test_loader.dataset) print('\nTest set: Average loss: {:.4f}, Accuracy: {}/{} ({:.0f}%)\n'.format( test_loss, correct, len(test_loader.dataset), 100. * correct / len(test_loader.dataset))) avg_loss.append(test_loss) accuracy.append(100. * correct / len(test_loader.dataset))
We can also adjust the learning rate, before firing up for training!
model = Net().to(device) learning_rate = [] def adjust_learning_rate(optimizer, iter, each): # sets the learning rate to the initial LR decayed by 0.1 every 'each' iterations lr = 0.001 * (0.95 ** (iter // each)) state_dict = optimizer.state_dict() for param_group in state_dict['param_groups']: param_group['lr'] = lr optimizer.load_state_dict(state_dict) print("Learning rate = ",lr) return lr ## Define Adam Optimiser with a learning rate of 0.01 optimizer = torch.optim.Adam(model.parameters(),lr=0.001) start = timeit.default_timer() for epoch in range(1,100): lr = adjust_learning_rate(optimizer, epoch, 1.616) learning_rate.append(lr) train(model, device, train_dataloader, optimizer, epoch) test(model, device, test_dataloader) stop = timeit.default_timer() print('Total time taken: {} seconds'.format(int(stop - start)))
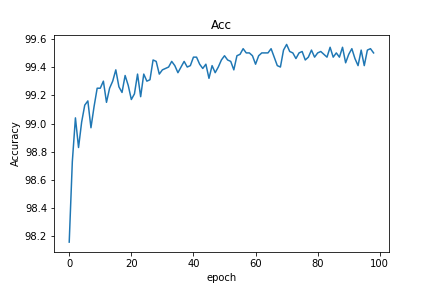
After training for 100 epochs, we get a test accuracy of, 99.57%, which is great, without doing any fancy stuffs!
Learning rate = 4.3766309037604346e-05 Train Epoch: 99 [0/60000 (0%)] Loss: 0.000113 Train Epoch: 99 [12800/60000 (21%)] Loss: 0.000007 Train Epoch: 99 [25600/60000 (43%)] Loss: 0.000006 Train Epoch: 99 [38400/60000 (64%)] Loss: 0.000010 Train Epoch: 99 [51200/60000 (85%)] Loss: 0.000027 Test set: Average loss: 0.0211, Accuracy: 9957/10000 (100%) Total time taken: 7074 seconds
The images for variation of Learning rate can be shown below:
(P.S. look for the typo)
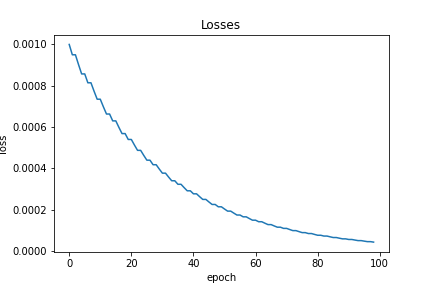
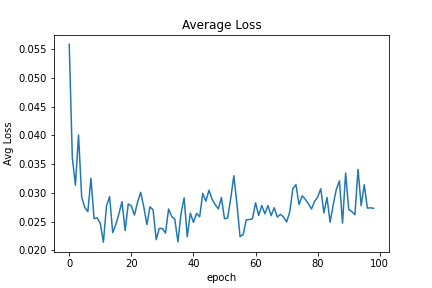
Similarly, the average accuracy, average loss, and loss are shown below:
The model can be downloaded from here.
You can use the model by loading it in Pytorch!
It takes lot of innovative methods, to surpass the current state of the art accuracy. If anyone can beat that, it will result in a new paper in a reputed journal. It looks like the model has got into its limit and the test accuracy is fluctuating between 99.57 % and 99.53%. Here is the basic framework for the work, now you are all set up to explore a new domain of competition, via novel methods!
Find the notebook [here]
Still then, Happy Coding!